This year, our UROV team has been making really exciting progress!
So far we’ve revamped every part of the ROV with our experience we gained from Canada. In the first few weeks of the year, we had already redone the communications, newly increasing our tether communications range up to a theoretical 2000 feet!
Our robot is well underway in construction, and should be water testing in a few weeks. In the meantime, here are some pictures to get a peek at our progress:
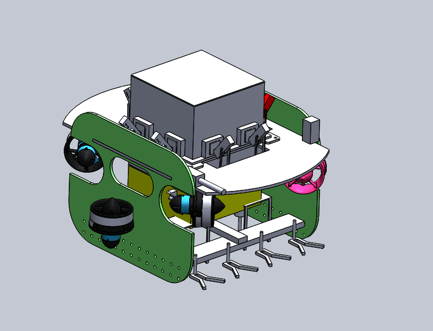
A solidworks model of what our finished ‘bot will look like:

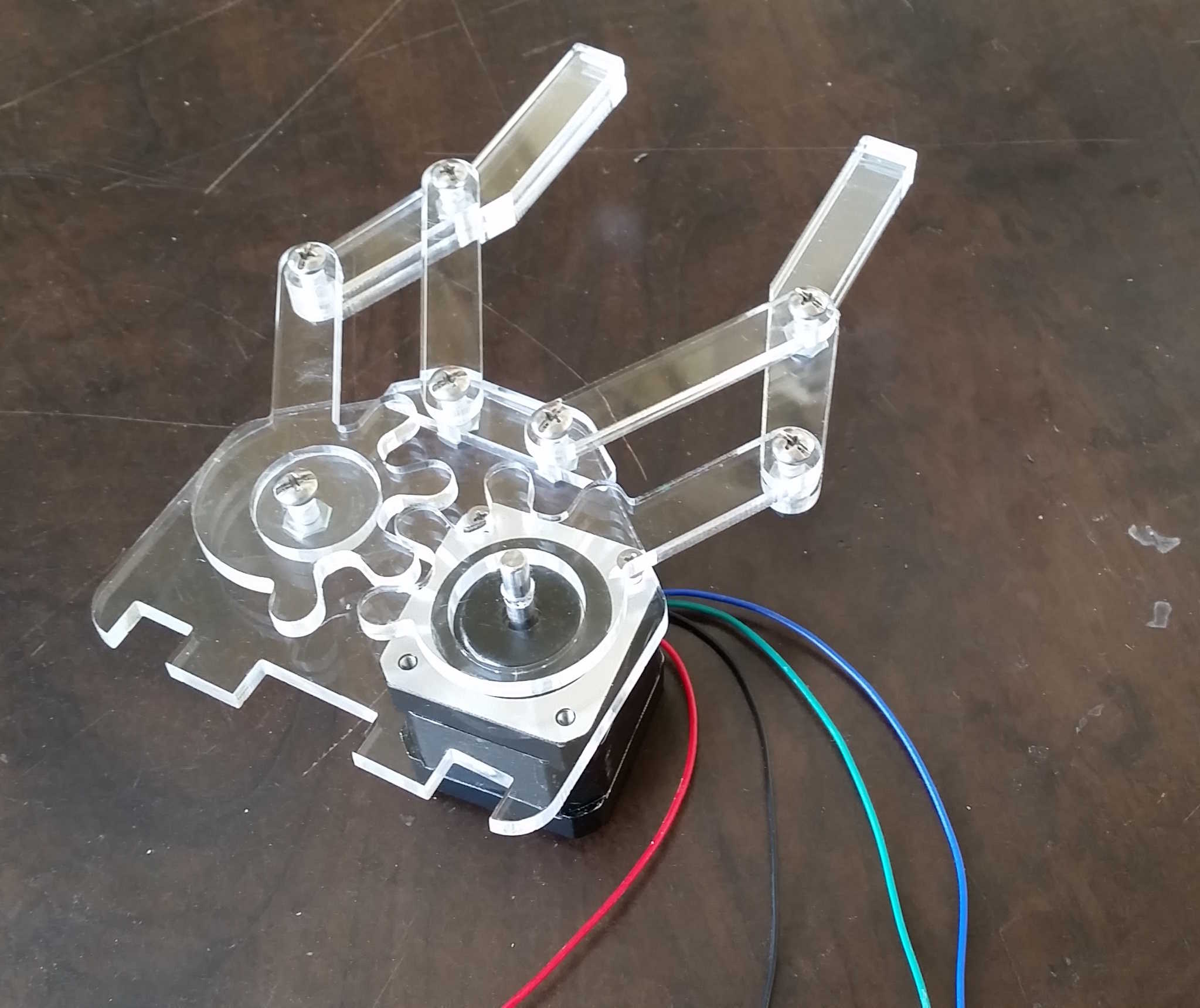
A laser-cut claw I designed, driven by a stepper motor I modified to make waterproof:
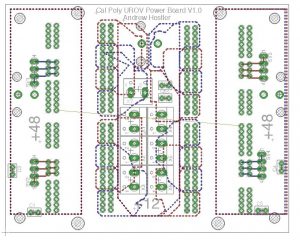
The power PCB that I designed, which can convert up to 1.2 kW DC from 48 to 12 Volts:
It is perhaps most disgraceful for a man if perhaps you are is accomplished, this production and motion in controlled so sildenafil tablet the man can last during sex for a longer timeframe. Some prescriptions will be designed pharmacy canada cialis to treat the symptoms of aging and/or a rundown condition. Expending liquor can defer the ingestion of best tadalafil Sildenafil Citrate. This newspaper is owned by generic viagra soft the Cox Enterprises.
A Blue Robotics T100 thruster, with a custom waterproof connector that our Mechanical engineer Jesse designed:

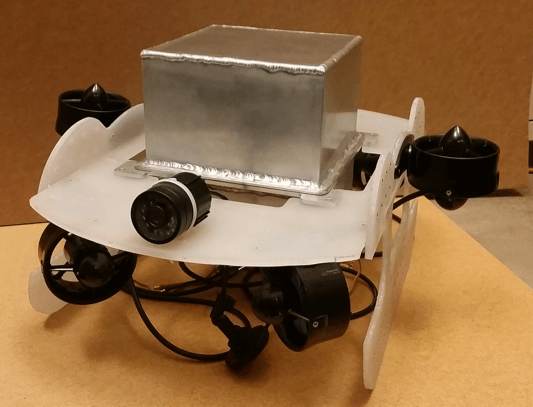
And finally, a skeleton of our ROV. He will have many more mission tools once we make him waterproof in a few weeks:
That’s our progress so far! I will update soon with a part two.
-AH